MicroPython downloads
MicroPython is developed using git for source code management, and the master repository can be found on GitHub at github.com/micropython/micropython.
The full source-code distribution of the latest version is available for download here:
- micropython-1.28.0.tar.xz (104MiB)
Daily snapshots of the GitHub repository (not including submodules) are available from this server:
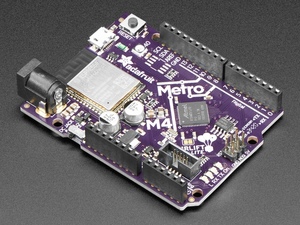
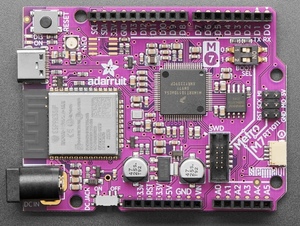
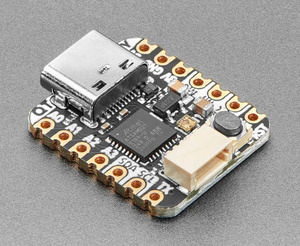
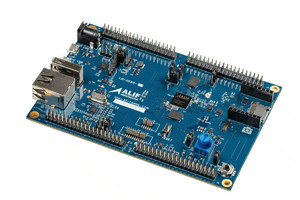
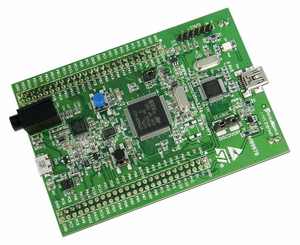
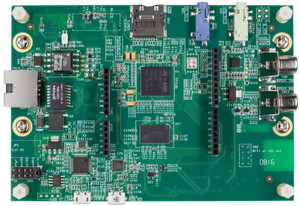
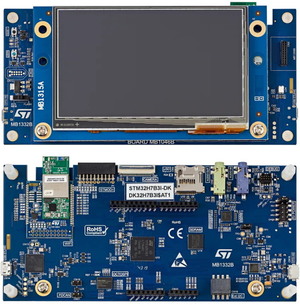
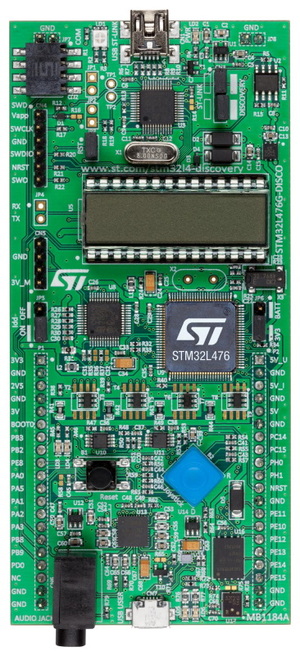
Firmware for various microcontroller ports and boards are built automatically on a daily basis and can be found below.
Filter by:
Port:
alif,
cc3200,
esp32,
esp8266,
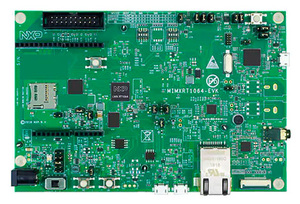
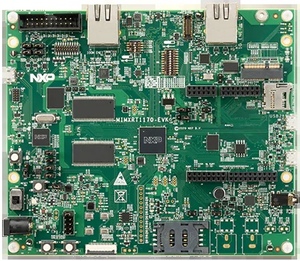
mimxrt,
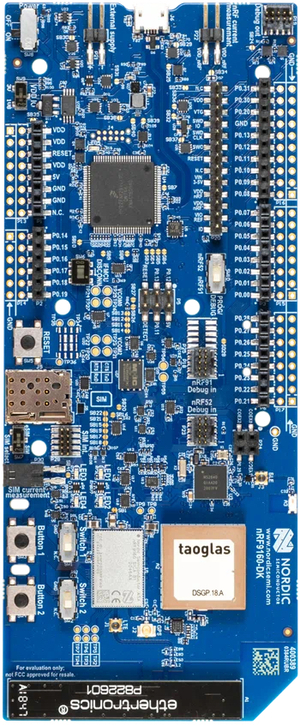
nrf,
renesas-ra,
rp2,
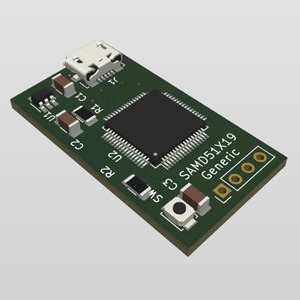
samd,
stm32
Feature:
Audio Codec,
BLE,
Battery Charging,
CAN,
Camera,
DAC,
Display,
Dual-core,
Environment Sensor,
Ethernet,
External Flash,
External RAM,
Feather,
IMU,
JST-PH,
JST-SH,
LoRa,
Microphone,
PoE,
RGB LED,
SDCard,
Secure Element,
USB,
USB-C,
WiFi,
microSD,
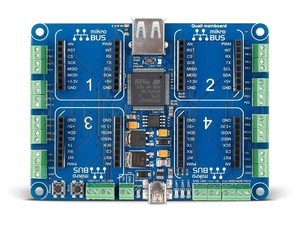
mikroBUS
Vendor:
Actinius,
Adafruit,
Alif Semiconductor,
Arduino,
BBC,
Cytron,
Espressif,
Espruino,
Ezurio,
Fez,
George Robotics,
HydraBus,
I-SYST,
LEGO,
LILYGO,
LimiFrog,
M5Stack,
Machdyne,
Makerdiary,
McHobby,
Microchip,
MikroElektronika,
MiniFig Boards,
NXP,
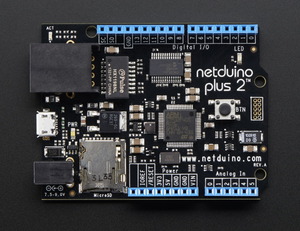
Netduino,
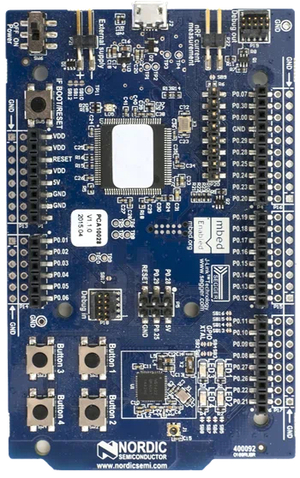
Nordic Semiconductor,
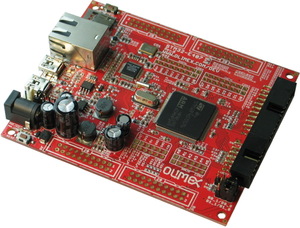
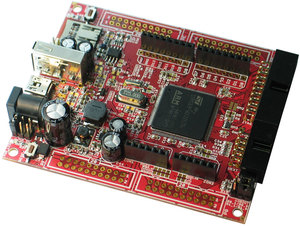
Olimex,
PHYTEC,
PJRC,
Particle,
Pimoroni,
Pololu,
Pycom,
Raspberry Pi,
Renesas Electronics,
ST Microelectronics,
Seeed Studio,
Silicognition,
Silicognition LLC,
Soldered Electronics,
SparkFun,
Unexpected Maker,
VCC-GND Studio,
Vekatech,
WIZnet,
Waveshare,
WeAct,
WeAct Studio,
Wemos,
Wireless-Tag,
nullbits,
u-blox
MCU:
AE722F80F55D5XX,
RA6M5,
cc3200,
esp32,
esp32c2,
esp32c3,
esp32c5,
esp32c6,
esp32p4,
esp32s2,
esp32s3,
esp8266,
mimxrt,
nrf51,
nrf52,
nrf91,
ra4m1,
ra4w1,
ra6m1,
ra6m2,
ra6m5,
rp2040,
rp2350,
samd21,
samd51,
stm32f0,
stm32f4,
stm32f411,
stm32f7,
stm32g0,
stm32g4,
stm32h5,
stm32h7,
stm32l0,
stm32l1,
stm32l4,
stm32u5,
stm32wb,
stm32wl